机器视觉光源专业制造商

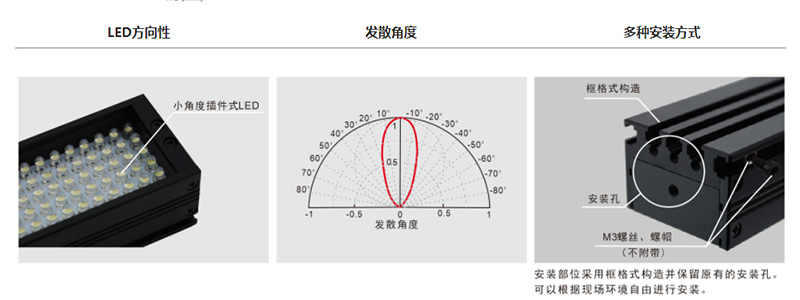
机器人视觉检测条形光源高亮条形光源是由高密度直插式LED阵列组成,适合大幅面尺寸检测。多个条形光源可自由组合,照射角度也可自由调整,某些情况下可代替环形光。 条形光源 产品特点: 亮度高,方向性
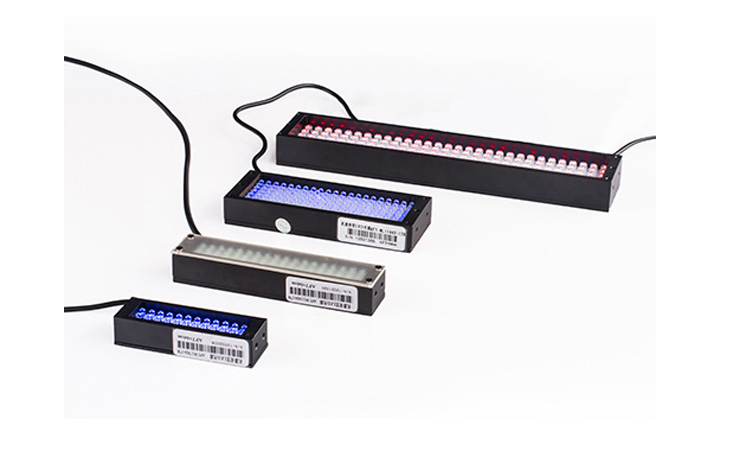
机器人视觉检测条形光源图片
◆ 机器人指引作业
◆ 汽车行业密封胶涂抹的有无检测
◆ 大幅面印刷材料外观检测
◆ 远距离照明
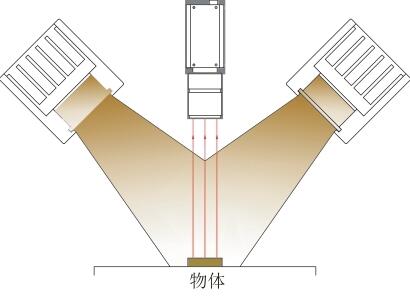
机器人视觉检测条形光源照明结构图
|
型号 |
电压 |
颜色 |
功率 |
发光区mm |
总面积mm |
高度mm |
|
|
红 |
白、蓝、绿 |
||||||
|
DY-28-8 |
DC24Vmax. |
红、白、蓝、绿 |
0.26W |
0.5W |
28*8 |
38*11 |
17 |
|
DY-42-15 |
DC24Vmax. |
红、白、蓝、绿 |
0.78W |
1.2W |
42*15 |
52*17 |
20 |
|
DY-52-15 |
DC24Vmax. |
红、白、蓝、绿 |
0.72W |
1.6W |
52*15 |
62*17 |
20 |
|
DY-74-26 |
DC24Vmax. |
红、白、蓝、绿 |
2.34W |
3.6W |
74*26 |
86*29 |
18 |
|
DY-80-14 |
DC24Vmax. |
红、白、蓝、绿 |
1.56W |
2.4W |
80*14 |
90*19 |
20 |
|
DY-102-18 |
DC24Vmax. |
红、白、蓝、绿 |
1.82W |
2.9W |
102*18 |
112*22 |
18 |
|
DY-102-36 |
DC24Vmax. |
红、白、蓝、绿 |
3.84W |
6.72W |
102*36 |
112*42 |
36 |
|
DY-130-15 |
DC24Vmax. |
红、白、蓝、绿 |
2.16W |
3.36W |
130*15 |
140*19 |
20 |
|
DY-160-16 |
DC24Vmax. |
红、白、蓝、绿 |
3.45W |
5.76W |
160*16 |
170*20 |
20 |
|
DY-160-25 |
DC24Vmax. |
红、白、蓝、绿 |
3.9W |
6W |
160*25 |
170*30 |
24 |
|
DY-260-14 |
DC24Vmax. |
红、白、蓝、绿 |
3.9W |
6W |
260*14 |
270*19 |
20 |
|
DY-260-36 |
DC24Vmax. |
红、白、蓝、绿 |
10.56W |
17.28W |
260*36 |
270*42 |
36 |
|
DY-350-33 |
DC24Vmax. |
红、白、蓝、绿 |
13W |
20W |
350*33 |
380*40 |
38 |
|
DY-450-33 |
DC24Vmax. |
红、白、蓝、绿 |
18.2W |
29W |
450*33 |
470*40 |
38 |
|
DY-500-50 |
DC24Vmax. |
红、白、蓝、绿 |
44.96W |
55.02W |
500*50 |
520*57 |
71.5 |
|
DY-550-33 |
DC24Vmax. |
红、白、蓝、绿 |
19.5W |
31W |
550*33 |
580*40 |
38 |
|
DY-1406-28 |
DC24Vmax. |
红、白、蓝、绿 |
28.8W |
50W |
1406*28 |
1420*34 |
30 |
|
光源颜色(波长) |
红色:620-630nm |
绿色:520-530nm |
蓝色460-475nm |
|
白色色温:6000-7500K |
红色:850/940nm |
紫色:365/385nm |
|
|
使用环境(室内) |
温度:0~40℃、湿度:20~85%非凝结 |
||
|
使用寿命 |
白色:3万小时,红色6万小时(根据使用环境不同,非保证值) |
||
|
配套控制器 |
PS1/PS2模拟控制器,PD2数字控制器,PBT2增亮模块 |
||
|
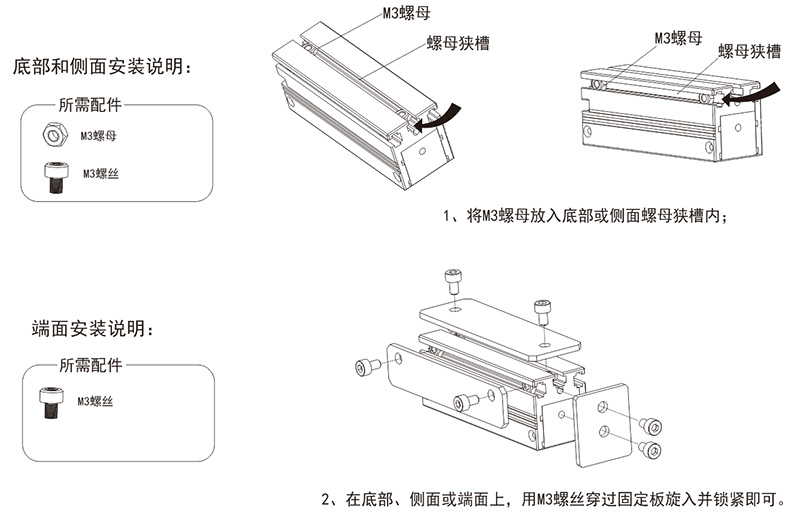
选配件 |
1、偏振膜、漫射板 |
||
|
2、延长线:1m/2m/3m/5m |
|||
|
产品认证 |
|
||
|
品质保证 |
提供一年产品质保,免费技术支持 |
||
|
光源设计开发 |
针对用户个性需求提供设计、开发服务,达到最佳图像效果 |
||
条形光源应用案例

机器视觉技术中有一种叫机器视觉3D表面定向检测的技术,主要是利用这项技术对反射光的影响来进行观察物体表面,因为工业应用的光度立体产生对比度图像,突出了局部3D表面变化。下面就给大家详细的介绍一下机器视觉3D表面定向检测的应用案例。
由于该技术使用的是专门的新算法,人们越来越意识到良好的照明对于机器视觉的成功的必要性,以及低成本的多光解决方案,这项技术越来越受到关注。
真实世界的物体有三个维度:高度,宽度和深度。为了使机器人等自动化系统成功运行,他们需要能够“看到”这三个维度。它们通过机器视觉系统提供这种“视觉”功能,其包括相机,照明和用于图像处理的PC。
然而,减少必须处理正确定位和分析对象数据量是机器视觉行业面临的最重要的挑战之一。
为了缩小数据,机器视觉设计师将使用滤镜,灯光和黑白相机。这些涉及彩色机器视觉应用。由此产生的灰度图像可以更快地处理,因为它们包含较少的数据。
同样,工程师将开发运动控制系统和机械夹具,以便使用2D机器视觉解决方案解决传统的3D应用。
采用当今的微处理器,现场可编程门阵列(FPGA)和图形处理器单元(GPU),设计人员可以获得更高的处理能力。但是,处理能力仍然是有限的。用于3D应用的最具成本效益的解决方案可以通过已知具有“光度立体声”的新生机器视觉技术来提供。
3D视觉概览
通过负担得起的处理能力,减少了减少彩色和3D应用所需数据量的需求。
通过用于基于传送器的3D系统的集成激光三角测量系统提供了一个示例,该系统通过廉价的数据处理、激光和光学来实现。在创建3D对象映射的过程中每秒能够生成数万个2D轮廓。
另一种选择是由新的飞行时间相机提供。它们为各种应用提供低分辨率3D地图,没有激光照射的安全风险。
对于面积更大的3D项目,通过在机器人的末端安装单个相机摄影测量系统,可以从不同位置拍摄同一物体的多幅照片。
使用这些图像,可以基于相机和对象之间的预定几何关系来计算图像中的每个像素的3D位置。关于大面积3D检查,两个摄像机并排排列以模仿人眼并捕获3D信息。
然而,为了在没有大视场的情况下高速检查物体,定性数据可能非常有用,而定量3D数据并不总是用于测量目的。这是光度立体技术介入的地方。

光度立体声的优点
测量任何给定像素的高度不是光度立体声的主要考虑因素。相反,该技术通过使用3D表面取向及其对反射光的影响产生对比度图像,突出局部3D表面变化。使用传统的2D成像时,显示的变化可能是不可见的。
当使用光度立体解决方案时,没有必要知道测试对象和相机之间的精确3D关系,也不必使用两个相机来捕获3D数据。而是使用具有多个照明源的单个相机系统。
通过在不同光照条件下观察物体,在光度立体技术期间估计其表面。该方法的基础是观察到表面反射的光量取决于表面相对于光源和观察者的取向。
由于新的专业算法,人们越来越意识到需要良好的照明以确保机器视觉成功,以及低成本的多光解决方案,例如LED灯管理器(允许通过以下方式控制四个灯)基于浏览器的简单界面,成本低于帧抓取器或智能相机分线盒,光度立体声在工业应用中的应用越来越受到关注。
目前,光度立体应用的独特优点使得许多以前难以或不可能解决的常见工业检测应用成为可能。
应用:夹子和轮胎
机器视觉系统在读取零件凸起的字母时一直存在问题。这个示例显示了一个具有许多功能表面特性的塑料连接器,以及一个方向符号和数字。没有对比,因为在凸起的字母和组成剪辑的材料之间没有任何区别。
制造商已经在诸如轮胎之类的较大物体上使用激光三角形系统,以便创建3D表面图。这些激光扫描系统通常是用于3D测量的复杂且昂贵的解决方案,即使它们最近变得更加集成和有效。
每个图像由相机馈送到运行图像库光度立体定位算法的PC中。这组合了所有相应的像素,建立了局部表面特性并从中产生了一种或多种类型的合成图像。
也可以在金属加工表面(如发动机头)上的孔上使用光度立体技术。由于这些具有成本效益的光度立体解决方案而显然具有优势的其他领域是铸造部件,激光标记和直接部件标记系统。

专业从事机器视觉条形光源,条形光源,大功率条形光源等。 服务于国内外各类精密光学领域,机器自动化领域,制造业配套领域等,您提供最专业化的服务,量身定制最适合您的光学类,自动化设备光源类产品的配套解决方案








